有限公司")
網(wǎng)站標(biāo)題

取消
清空記錄
歷史記錄
清空記錄
歷史記錄



 瀏覽器自帶分享功能也很好用哦~
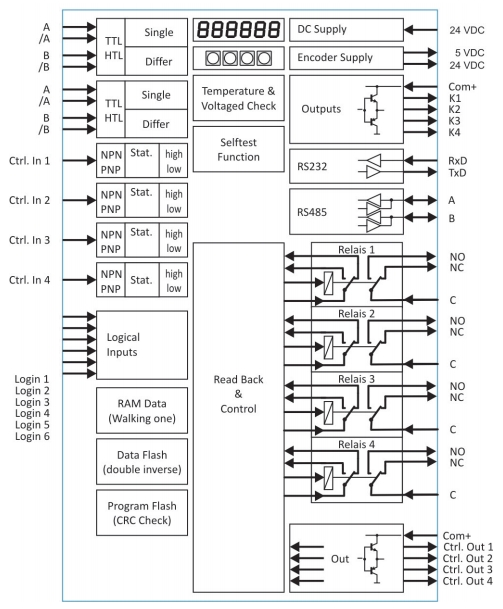
瀏覽器自帶分享功能也很好用哦~? Measuring of the actual values directly on the drive and periphery
? Comparison between the programed target statuses and triggering the user-programed fault, if the movement is not run plausible or limits are exceeded
? Permanent measuring of the actual value on both encoders
(speed, direction of rotation, standstill, actual position and differential positions)
? High level of external safety (Recognition of electrical or mechanical errors in the machinery /sensor systems / wiring etc.)
? High level of internal safety (Detection of internal errors and failures of device components)
? Comparison between the programed target statuses and triggering the user-programed fault, if the movement is not run plausible or limits are exceeded
? Permanent measuring of the actual value on both encoders
(speed, direction of rotation, standstill, actual position and differential positions)
? High level of external safety (Recognition of electrical or mechanical errors in the machinery /sensor systems / wiring etc.)
? High level of internal safety (Detection of internal errors and failures of device components)

產(chǎn)品詳情
動(dòng)監(jiān)測(cè)器MS640")
動(dòng)監(jiān)測(cè)器MS640")
? Measuring of the actual values directly on the drive and periphery
? Comparison between the programed target statuses and triggering the user-programed fault, if the movement is not run plausible or limits are exceeded
? Permanent measuring of the actual value on both encoders
(speed, direction of rotation, standstill, actual position and differential positions)
? High level of external safety (Recognition of electrical or mechanical errors in the machinery /sensor systems / wiring etc.)
? High level of internal safety (Detection of internal errors and failures of device components)
? Comparison between the programed target statuses and triggering the user-programed fault, if the movement is not run plausible or limits are exceeded
? Permanent measuring of the actual value on both encoders
(speed, direction of rotation, standstill, actual position and differential positions)
? High level of external safety (Recognition of electrical or mechanical errors in the machinery /sensor systems / wiring etc.)
? High level of internal safety (Detection of internal errors and failures of device components)
13818472470
產(chǎn)品詳情
聯(lián)系我們
服務(wù)熱線
13818472470
公司地址
上海市閔行區(qū)都市路778弄9號(hào)102室
掃一掃
版權(quán)所有 ? 上海捷面自控技術(shù)有限公司
滬ICP備20016160號(hào)-1
選擇區(qū)號(hào)